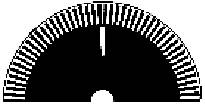
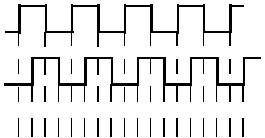
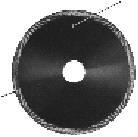
Techno Linear Motion Catalog28Technical InformationIncremental encodershave only one track (or two) of segment patterns. The resolution of the encoder isequal to the number of bands in the pattern segment. Absolute positioning information cannot be providedsince all of the signals are the same. All incremental encoders rely on a counter to determine position anda stable clock to determine velocity. Most incremental encoders provide a single mark on the disc calledthe Z channel, or indexer. The pulse from this channel provides a reference once per revolution to detecterrors within a given revolution.If a second band of patterns and a second light sourcewere added to an incremental encoder, the result is aquadrature encoder, which is very common inmachining and positioning applications. Channel B(second band and light source) is spaced one half aslot width apart from the Channel A light source andphoto detection. Electrically, the two signals are 90°out of phase from each other as shown.The quadrature multiplication results from the two square waves having four unique states at any givenmoment. Notice that as the waves move in one direction ( the disk rotates in one direction), the four statescycle in a specific sequence. As the disk rotates in the opposite direction, the four states cycle in thereverse sequence. Thus, the direction of rotation and the quad multiplying effect (which increases resolutionfourfold) can be produced by the second channel.Sizing Stepper MotorsBefore the correct Stepper Motor can be chosen for a particular application, the following information mustbe determined:a. operating speed in steps/sece. time to accelerate in millisecondsb. torque in ounce •inchesf. time to decelerate in millisecondsc. load inertia in lb •in2g. type of drive system to be usedd. required step angleh. size and weight considerationsOnce this information is known, the best motor/drive combination can be determined using torque vs. speedcurves and the formulas given on this and the following pages.Torque,T(oz•in)T= FrwhereF= Force (in ounces) required to drive the loadr= Radius (in inches)Moment of Inertia, I(lb •in2)Wr2I= –––– for a disc2Incremental EncoderAbsolute EncoderClosed LoopQuadrature DetectA ChannelB ChannelQuadratureDetectZ Channel"Marker"SlotsThe Encoder DiskQuadrature Encoder