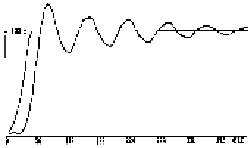
Techno Linear Motion Catalog38Technical Informationat all velocity changes. Parabolic changes in velocity take advantage of the torque versus speed characteristics ofstepper motors. Acceleration during a velocity increase is highest at the beginning of the change, when the torqueoutput of the motor is at its peak (see Figure 2). Since acceleration is proportional to torque, this situation is optimal.Trapezoidal profiles require high accelerations at all points, even when the torque output of the stepper motor is at aminimum (see Figure 3), and thus should be avoided. Parabolic changes provide a smooth transition from one pointto the next, holding dynamic shock or change of acceleration, to a minimum. Trapezoidal profiles, in contrast,introduce large changes in acceleration, i.e. shock, two times at points in the velocity profile where torque is relativelylow, making the motor susceptible to stalling (see Figure 3). Parabolic velocity control is especially effective whenproducing arc sections because arcs require constantly changing acceleration. Techno stepper motor controllershave been designed to minimize the possibility of dynamic shock during program execution by incorporatingparabolic ramping functions into the control electronics.Servo Control (closed loop): The presence of a feedback mechanism is what provides the signal checking,creating a closed control loop. Feedback is most often found in the form or position feedback, supplied from a rotaryoptical encoder. Even with the presence of a comparison routine, several methods must be employed to overcomesystem errors.Proportional gain is a technique that supplies a correction force proportional to the magnitude of the detected positionerror. This adjustment puts the system back to close to the desired state, but is incapable by itself of fully correctingdeviations. Integral gain is used to measure and cumulate position errors (steady state errors) so that a restoringforce proportional to the cumulative position error can be applied to the system. A larger cumulative error results ina larger restoring force, and the system becomes more accurately corrected. Differential gain is a method thatutilizes the time rate of change of the position feedback information and compares it to the desired velocity. Arestoring force proportional to the difference of velocities will act to minimize deviations from actual and desiredvelocity rates. These concepts are designed into a PID (Proportional, Integral, Differential) chip on the controllercard. The Techno Servo Controller Card utilizes all three types of system correcting techniques, providingPID control.A second factor to be aware of whenchoosing a servo controller is the degreeto which the system is damped. Thereare three different scenarios to considerwith respect to damping, as shownbelow.An underdamped system willovershoot its destination, then oscillateback and forth about its desired state.This causes large inaccuracies andvibrations, which should be avoided.A critically damped system is providedwith enough motion damping toovershoot the target one time, thenasymptotically approach the steadystate. This is preferred in theory, but itis a difficult state to maintain in reality.An overdamped system will take a verylong time to reach the desired position,asymptotically reaching the desiredstate without position overshoot. Thiswill tend to put a higher burden on thedriving motors.UnderdampedCritically DampedOverdamped