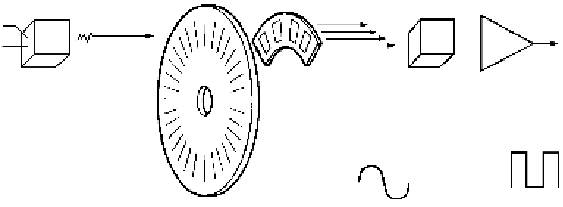
Techno Linear Motion Catalog27Technical InformationMany advantages are realized with brushless DC servo motors. The inside out construction allows forexcellent heat dissipation. This results in a higher continuous torque and a higher output rating than foundin a comparably sized brushed motor. Also, speeds up to 60000 rpm are not uncommon. Speed torqueripple and cogging torque are both reduced, because there are no mechanical brushes, eliminating thebrushed contact. These motors also tend to be maintenance-free. Disadvantages are primarily increasedcost, increased control complexity, and increased weight.AC servomotors are another variety that offers high-end performance. Their physical construction issimilar to that of the brushless DC motor; however, there are no magnets in the AC motor. Instead, boththe rotor and stator are constructed from coils. Again, there are no brushes or contacts anywhere in themotor which means they are maintenance-free. They are capable of delivering very high torque at veryhigh speeds; they are very light and there is no possibility of demagnetization. However, due to theelectronic commutation, they are extremely complex and expensive to control.Perhaps the largest advantage of using servo motors is that they are used in closed loop form, whichallows for very accurate position information and also allows for high output torque to be realized at highspeeds. The motor will draw the required current to maintain the desired path, velocity, or torque, and iscontrolled according to the requirements of the application rather than by the limitations of the motor.Servo motors put out enormous peak torque at or near stall conditions. They provide smooth, quiet operation,and depending upon the resolution of the feedback mechanism, can have very small resolutions.Among the disadvantages of servo motors are the increased cost, the added feedback component, andthe increased control complexity. The closed loop feature can be a disadvantage for the case when thereis a physical obstacle blocking the path of motion. Rather than stalling, the servo motor will continue todraw current to overcome the obstacle. As a result, the system hardware, control electronics, signal amplifierand motor may become damaged unless safety precautions are taken.Rotary Optical Encodersare the popular choice to supply signal feedback. They are mounted directly onthe shaft of a servo motor. The basic principle of operation is as follows: A disc or plate containing opaqueand transparent segments passes between an LED and a detector to interrupt a light beam. All rotaryencoders consist of a light source, light detector, code wheel, and signal processor. There are two basicencoder styles: absolute and incremental.Absolute encoders use multiple detectors and up to 20 tracks of segment patterns. As the encoder discturns, the binary output changes one bit at a time. For each encoder position, there is a different binaryoutput, therefore shaft position is absolutely determined. The resolution of an absolute encoder is determinedby the number of concentric pattern tracks on the wheel. Absolute encoders may be necessary for accuracycritical applications, military applications, or applications requiring accurate position information after powerup or power failure, but this level of position detection is not required for typical machining and positioningapplications.Light SourceDiskGrid AssemblyPhotoDetectorSquaringCircuitrySquareSine