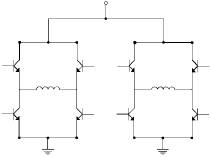
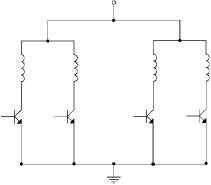
Techno Linear Motion Catalog36Technical InformationPower Supplieshave the task of converting supply AC voltage into usable form. The most common typeof power supply is the regulated type which uses transformers or switching transistors and a rectifyingstage. Accurate power requirements will use different filtering techniques to eliminate AC supply line ripple.Motor voltage supplies can usually be simple or even unregulated DC supplies. Care should be taken withovervoltage protection. Since a motor is basically a generator run in “reverse”, it generates a brakingcurrent when being stopped. This current either has to be dissipated through resistors or regenerated backinto the voltage supply capacitors. Rapid or frequent braking could overcharge the capacitors, so amechanism for “dumping” excess current must be used to protect the power supply.Stepper Motor Driversare supplied with the required step sequence from the stepper control card and, inturn, supplies stepper motors with current and voltage. The function of a stepper motor driver is to drivecurrent through the appropriate phase windings of the motor to produce a stepped motion.A unipolar driver is only able to supply current through a winding in one direction, and the voltage cannotreverse polarity. This means that the windings are split and only half of the winding is used at a time. Abenefit to this approach is that the electrical time constant is reduced and the motor will have a fasterresponse time; however, there are significant limitations. To change rotational direction of the motor,current must be channeled to the other half of the winding in reverse polarity. This creates mutual inductancein the unused portion of the winding, which reduces motor accuracy. Also, there is a significant loss oftorque at low speeds and the motor becomes very inefficient.A bipolar driver utilizes all of the windings simultaneously. When reversing direction, the current can bedriven out which reduces current decay and enhances motor performance. In a bipolar drive, phase voltageswitches from positive to negative — i.e., current is actively forced into and out of the windings. Bestperformance is usually attained with a four or eight lead motor wired for bipolar parallel drive due to thetorque-speed curves associated with this type of arrangement.Servo Motor Amplifiersperform a very similar task to the stepper driver; however, motion is not actuatedin steps. Servos have smooth continuous motion capabilities, and the amplifiers are designed to providethe required voltage and current to the motor winding. Since servo motors have only two leads, the motoris reversed by reversing the polarity of the voltage across the leads. Servo amplifiers are supplied with thecurrent and voltage requirements, from the servo controller card, which is updated in real time via feedback.Typically, the controller supplies a 10V analog signal and the amplifier produces a current proportional tothis signal. Some of the newer amplifier/controller systems produce digital signals and skip the analogconversion. This arangement simplifies the circuitry.2-phase stepper driver in unipolar modeNote that only half of each phase or coil isenergized at any time. The electronics are lessexpensive to manufacture but the performanceis degraded.2-phase stepper driver in bipolar modeNotethattheentirephaseisenergized,providinggreater power. Also note that the driveelectronics have twice as many powercomponents as in the unipolar mode.V+1B1A2A2B12V+