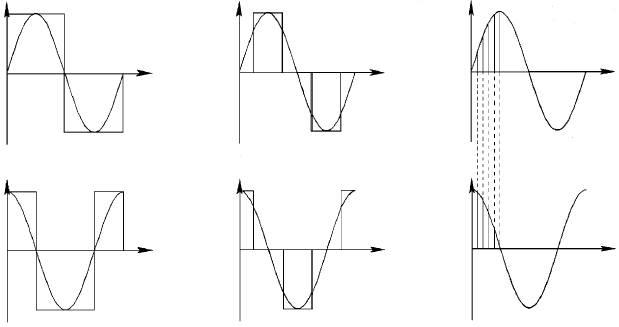
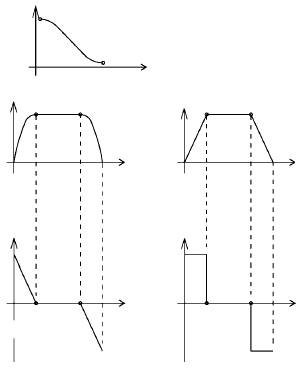
Techno Linear Motion Catalog37Technical InformationStepper Control (open loop): Stepper motor controllers typically operate in one of three modes. Full stepmode provides the coarsest resolution, half step mode is next, and microstep mode offers the smallestresolution. Most positioning and machining applications are well served by half step mode, but microsteppingmay be necessary. Microstepping is when the control electronics divide each full motor step into manysmaller steps by manipulating the current levels in the windings. If a servo system is not desired, applicationsinvolving very low speeds and much higher resolutions can utilize the advantages of microstepping.There are several key points to consider when analyzinga stepper motor control unit. Circular interpolation is whentwo stepper motors are controlled simultaneously toachieve circular motion. Due to the digital nature of steppermotors, all arcs have to be approximated by a series ofvery small line segments. The deviation from a true circularpath is determined by the size of the line segmentapproximations. Techno stepper motor controllersexecute circular interpolation true to within 1 step atall points along the arc.Since stepper motors have decreased torque output atincreased speeds (see Figure 1), it is important tounderstand how control electronics handle accelerationand deceleration. Machining and positioningapplications often involve direction and velocitychanges. The graphs indicate a velocity change, overtime, from point A to point B. Two common types ofvelocity profiles, parabolic and trapezoidal, areillustrated. Since stepper motors can stall underdynamic shock, it is important to have a smooth velocityprofile (see Figure 2). The most effective way to achievea smooth profile is to use parabolic ramping functionsMicroHalfFullFull stepping is a 4-point approximation of the sine/cosine waves. Half step is just an 8-pointapproximation of the sine/cosine waves. If more points are used to approximate the sine/cosine waves,this is called mini- or microstepping.TorqueABttttAccelerationFigure 1VelocityVelocityVelocityFigure 3 TrapezoidalFigure 2 ParabolicAccelerationA BAB